上海交大校友Kun Huang荣获CoRL 2022最佳论文奖,机器人学与机器学习领域再创佳绩
上海交大校友Kun Huang荣获CoRL 2022最佳论文奖,机器人学与机器学习领域再创佳绩
CoRL是一个专注于机器人学习研究的会议,它涵盖机器人学、机器学习和控制等多个领域。会上,众多研究成果得以展示,既有理论也有实践应用。来自世界各地的科研人员齐聚一堂,共同讨论机器人学习领域的最新进展,助力相关技术的迅速进步。经过训练,IRF的性能有了显著提升,甚至超过了那些有示范或精心设计的奖励作为基准的情况,在机器人技能评估上显示了其显著的优势。
会议概况

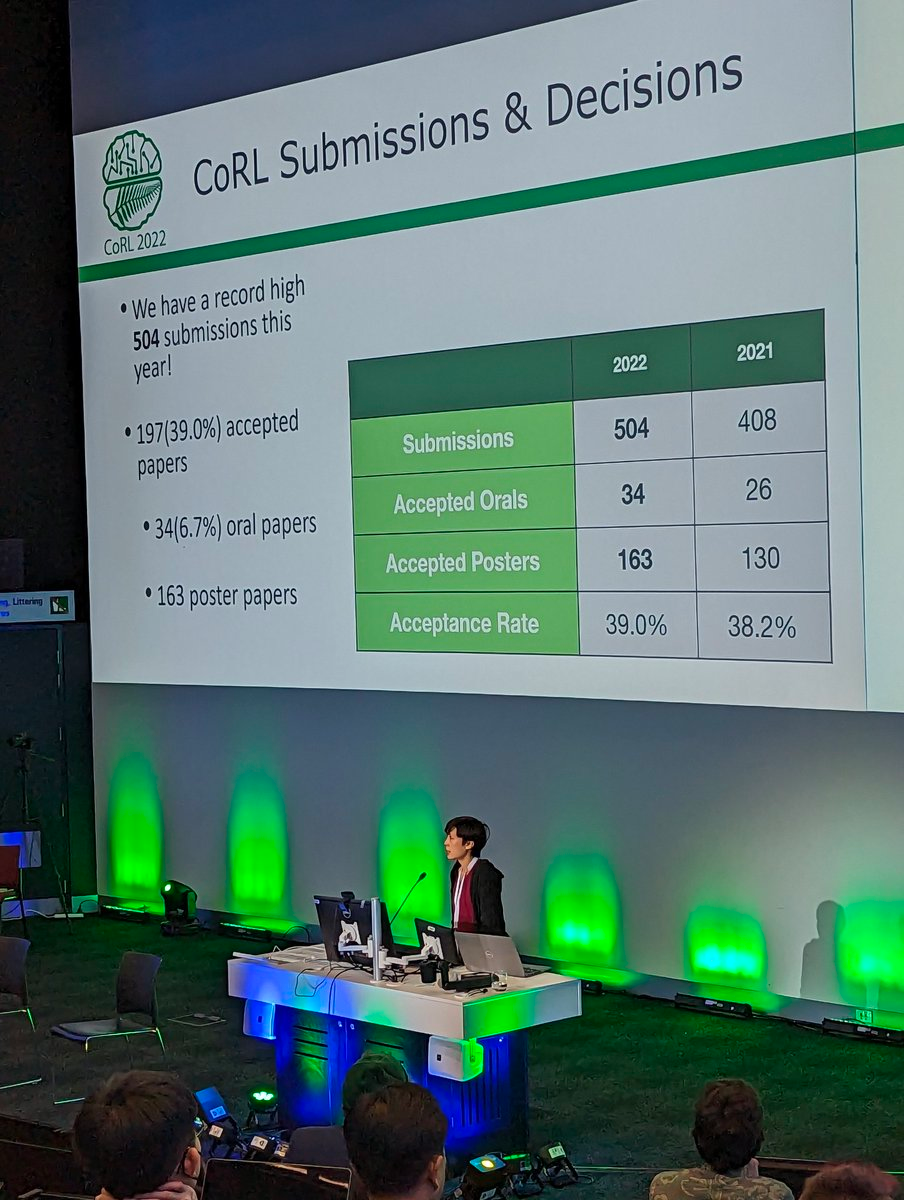
CoRL是一个专注于机器人学习研究的会议,它涵盖机器人学、机器学习和控制等多个领域。会上,众多研究成果得以展示,既有理论也有实践应用。来自世界各地的科研人员齐聚一堂,共同讨论机器人学习领域的最新进展,助力相关技术的迅速进步。

交互行为训练
通常,物理互动能让我们察觉不易察觉的细节,比如通过拉桌腿来检验其牢固性,或者倒水瓶来检查是否有漏水的迹象。这项研究提出,应训练机器人自行构建这类互动模式,以评估它们执行任务的能力。经过训练,IRF的性能有了显著提升,甚至超过了那些有示范或精心设计的奖励作为基准的情况,在机器人技能评估上显示了其显著的优势。
算法测试实验
为了检验算法的稳定性和适用范围,科研人员选取了拥有九个关节的D'Claw,在模拟机器人拧紧作业的实验中对其进行了检验。虽然具体实验地点不详,但据推测,这应该是在一个专业的实验室里。通过这一实际机器人的测试,他们能够收集到算法在实际应用中的效果数据,这对于算法的优化和提升极为关键。
视觉运动系统

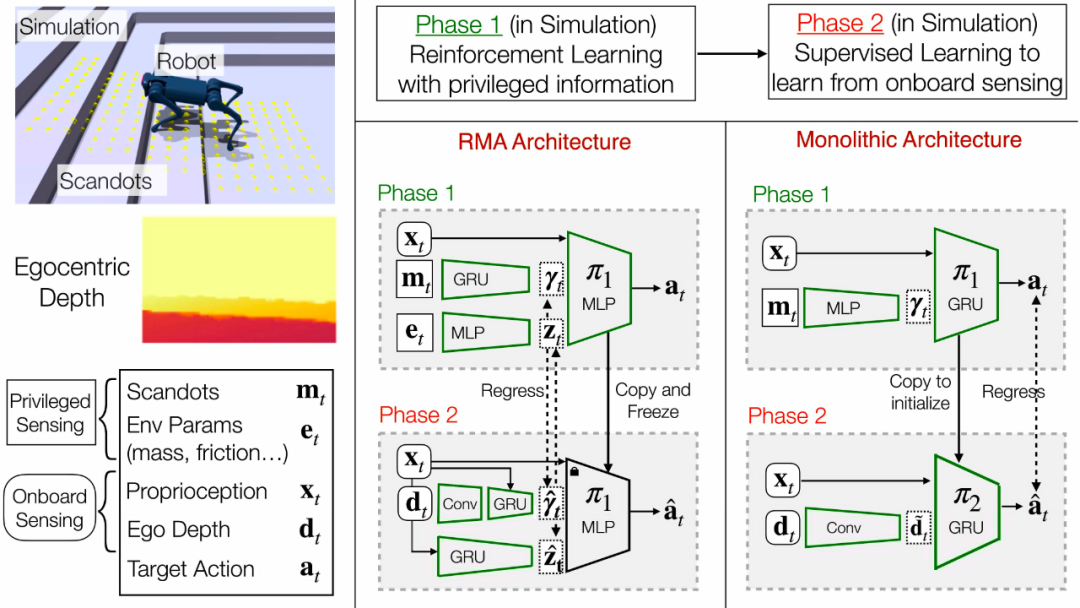
动物依靠视觉进行快速且精准的行动,这一技能长久以来都是机器人研究追求的目标。宾夕法尼亚大学GRASP实验室的助理教授带领的研究团队取得了新进展,他们研发出首个能够穿越楼梯、路边等多种复杂地形的机器人运动系统,并在中等体型、仅使用一个正面深度摄像头的四足机器人上进行了演示。研究人员首先在模拟环境中对机器人策略进行了分阶段训练,经过训练,这些策略不仅能够成功应用于现实世界,还能在实时运行中展现出色的适应性。

语言模型结合
大型语言模型汇聚了丰富的全球语义信息,对机器人而言颇具价值。然而,它们缺少实际世界的经验,导致在做出决策时遇到难题。谷歌的研究人员提出,应通过预先训练的技能为这些模型奠定现实基础,并将它们与机器人的物理任务相融合。在融合过程中,不仅要让模型能够理解指令,还要评估其动作对执行高级指令的辅助概率,从而赋予机器人更高级的语言决策智能。
科研团队风采
宾夕法尼亚大学GRASP实验室的助理教授领导着感知、行动和学习研究团队。他们致力于计算机视觉、机器学习与机器人技术的交汇领域。与此同时,谷歌的研究员们在语言模型与机器人融合方面进行了深入探索。众多团队正为机器人学习领域添砖加瓦,共同推动机器人技术持续向前发展。
大家对未来的机器人,在整合了视觉、语言等多种技能之后,预计会在哪些场合率先广泛应用?欢迎点赞和转发这篇文章,让我们共同探讨这个引人入胜的话题!



