GTIC 2022全球自动驾驶创新峰会:系统无限接近人脑,才能真正实现无人驾驶
GTIC 2022全球自动驾驶创新峰会:系统无限接近人脑,才能真正实现无人驾驶
自动驾驶技术是当前科技界的热门话题,它能提高交通效率,降低事故发生率。自动驾驶要想成熟,必须跨越交通场景理解、情境预测和驾驶决策这三重难关。薛教授的团队研发了单目视觉定位技术,并融合神经网络,成功达到了厘米级的定位准确度,为解决定位难题注入了新的活力。薛教授的团队对交通状况进行了长期的预测分析,并编制了BLVD数据集,其中包含了车辆轨迹、行为和意图等多方面信息。这正是薛教授团队持续追求的愿景。

自动驾驶价值与挑战
自动驾驶技术是当前科技界的热门话题,它能提高交通效率,降低事故发生率。然而,这个复杂的智能系统面临诸多技术挑战。薛建儒教授详细阐述了其中的困难和团队的研究进展,使我们更深入地了解了自动驾驶。

自动驾驶要想成熟,必须跨越交通场景理解、情境预测和驾驶决策这三重难关。这些环节都需要众多技术支持,处理起来相当棘手。
自动驾驶技术路线
自动驾驶技术分为自主和协同两种路径。自主智能依靠多种传感器融合的环境感知,以及鲁棒的运动优化与控制,实现无人驾驶。这种技术路径已在典型的自动驾驶系统中得到了实际应用和验证。
系统接收地图和环境信息,然后给出决策并执行。尽管方向已定,但技术的实现过程充满挑战,必须持续攻克关键的技术难题。
自动驾驶关键点
实现自动驾驶技术,需把握两大核心要素:一是对周围环境的深刻洞察与准确预判,二是运动轨迹的规划与操控。环境状况复杂且多变,要精确把握和理解,其难度相当高。

运动与控制策略必须针对不同环境和意外情况作出调整。只有成功解决这两个核心问题,自动驾驶技术才能变得更加安全和稳定。
交通场景识别理解之定位导航
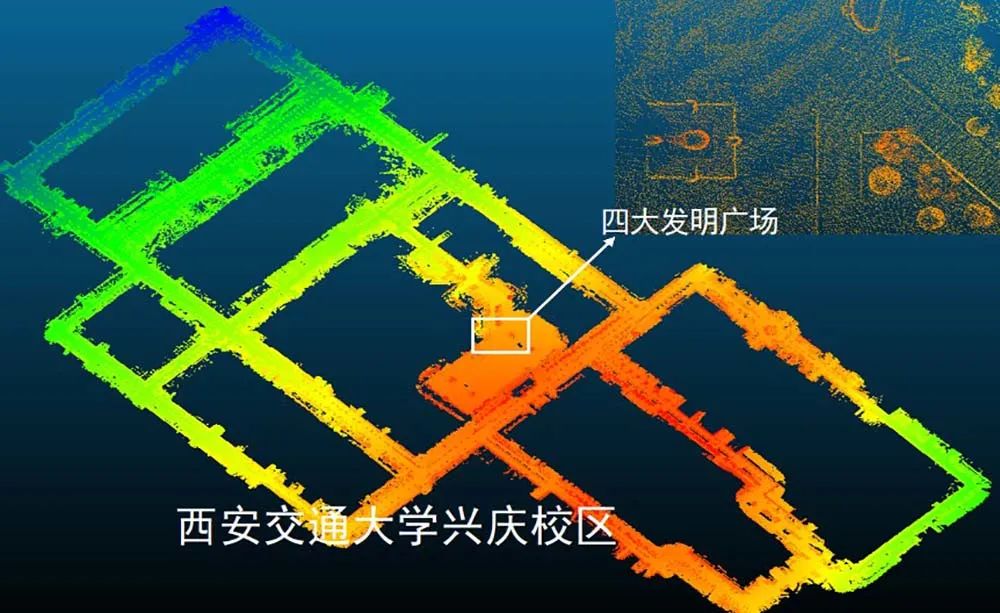
在交通环境中,识别与解读主要涉及两个关键环节:一是定位导航,二是自主避障。过去,定位导航主要依赖全球卫星定位系统与地图的结合,然而,在自动驾驶领域,这种定位方式已无法满足对精度的高要求。
制作、保存及更新高精度地图的费用相当昂贵。薛教授的团队研发了单目视觉定位技术,并融合神经网络,成功达到了厘米级的定位准确度,为解决定位难题注入了新的活力。
交通场景识别理解之动态场景检测
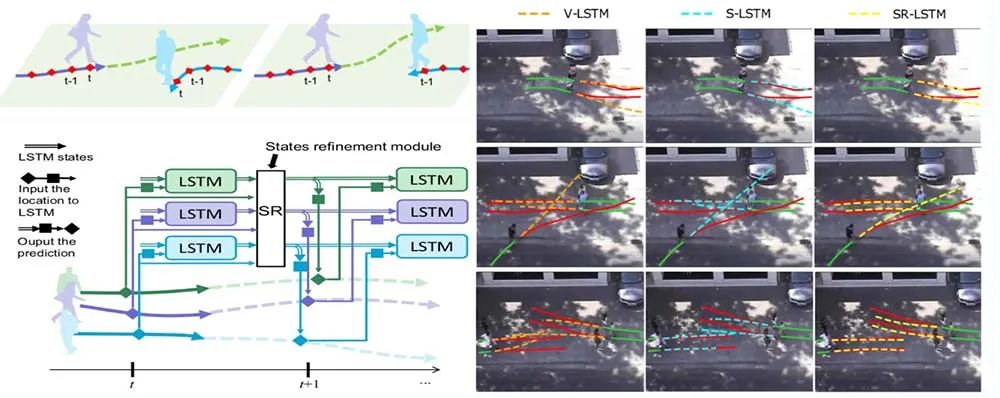
在动态场景检测领域,当前的方法识别准确率已超过九成,然而精确度仍有待提高。业界正在探索将检测、追踪与预测技术融合的新路径,并打算整合现有技术手段。
自动驾驶要求一丝不苟,精确的检测不可或缺,这样才能应对各种复杂的道路情况,确保行车安全。
类人智能驾驶研究
实现自动驾驶,达到类似人类的智能驾驶水平至关重要。薛教授的团队对交通状况进行了长期的预测分析,并编制了BLVD数据集,其中包含了车辆轨迹、行为和意图等多方面信息。
他们通过分析交通事故并预测其发生,来评估驾驶员的注意力水平。此类研究为类似人类的智能驾驶技术提供了数据基础和指引方向。
实现自主驾驶的目标

为了实现完全的自动驾驶,我们需要打造一个具备直观认知能力的计算体系,使其尽可能接近人类大脑的功能。这正是薛教授团队持续追求的愿景。
自动驾驶的发展道路漫长,需要克服众多技术难题,并逐步构建完善的体系。关于自动驾驶何时能走进我们的生活,大家有何看法?欢迎在评论区留言讨论。记得点赞并转发这篇文章。